|
SuperTinyKernel™ RTOS 1.05.3
Lightweight, high-performance, deterministic, bare-metal C++ RTOS for resource-constrained embedded systems. MIT Open Source License.
|
|
SuperTinyKernel™ RTOS 1.05.3
Lightweight, high-performance, deterministic, bare-metal C++ RTOS for resource-constrained embedded systems. MIT Open Source License.
|
Lightweight High-Performance Deterministic C++ RTOS for Embedded Systems
![]()

![]()
![]()
![]()
SuperTinyKernel™ RTOS (STK) is a high-performance, deterministic, bare-metal C++ real-time operating system designed for resource-constrained embedded systems. By focusing on a preemptive and deterministic thread scheduler rather than peripheral abstraction (HAL), STK provides a lightweight yet robust foundation for multitasking embedded applications where timing and minimal overhead are critical.
STK is implemented in C++ with a clean Object-Oriented Design while remaining friendly to embedded developers:
It is an open-source project, navigate its internals for more details.
| Feature | Description |
|---|---|
| Soft real-time | No strict time slots, mixed cooperative (by tasks) and preemptive (by kernel) scheduling |
| Hard real-time (KERNEL_HRT) | Guaranteed execution window, deadline monitoring by the kernel |
| Static task model (KERNEL_STATIC) | Tasks created once at startup |
| Dynamic task model (KERNEL_DYNAMIC) | Tasks can be created and exit at runtime |
| Rich scheduling capabilities | All major scheduling strategies are supported: priority-less (Round-Robin), fixed-priority, weighted (SWRR), earliest-deadline-first (EDF), and mixed-criticality adaptive (MCAS/MCAS4) |
| Mixed-criticality | Supports MCAS (2-level) and MCAS4 (4-level) adaptive strategies featuring SWRR-based group scheduling, automatic cascade escalation/recovery, and elastic CPU share adaptation driven by per-group EWMA execution-pressure estimation |
| Tick or Tickless modes | Supports fixed-interval periodic interrupts (Tick) for simplicity, or dynamic timer-based wakeups (Tickless, KERNEL_TICKLESS) to maximize CPU sleep duration and power efficiency |
| Extensible via C++ interfaces | Kernel functionality can be extended by implementing available C++ interfaces |
| Multi-core support (AMP) | One STK instance per physical core for optimal, lock-free performance |
| Memory Protection Unit (MPU) support | Supports privileged ACCESS_PRIVILEGED and non-privileged tasks ACCESS_USER |
| Low-power aware | MCU enters sleep when no task is runnable (sleeping) |
| Synchronization API | Rich set of primitives in stk::sync: Mutex, RWMutex, Semaphore, Event, EventFlags, ConditionVariable, Pipe, SpinLock, ScopedCriticalSection — plus low-level hw::CriticalSection and hw::SpinLock |
| Thread-Local Storage (TLS) | Per-task TLS via a dedicated CPU register (r9 on ARM Cortex-M, tp/x4 on RISC-V). GetTls() / SetTls() are inline zero-overhead helpers |
| Tiny footprint | Minimal code unrelated to scheduling |
| Safety-critical systems ready | No dynamic heap memory allocation (satisfies MISRA C++:2008 Rule 18-4-1) |
| C++ and C API | Can be used easily in C++ and C projects |
| Easy porting | Requires very small to none BSP surface |
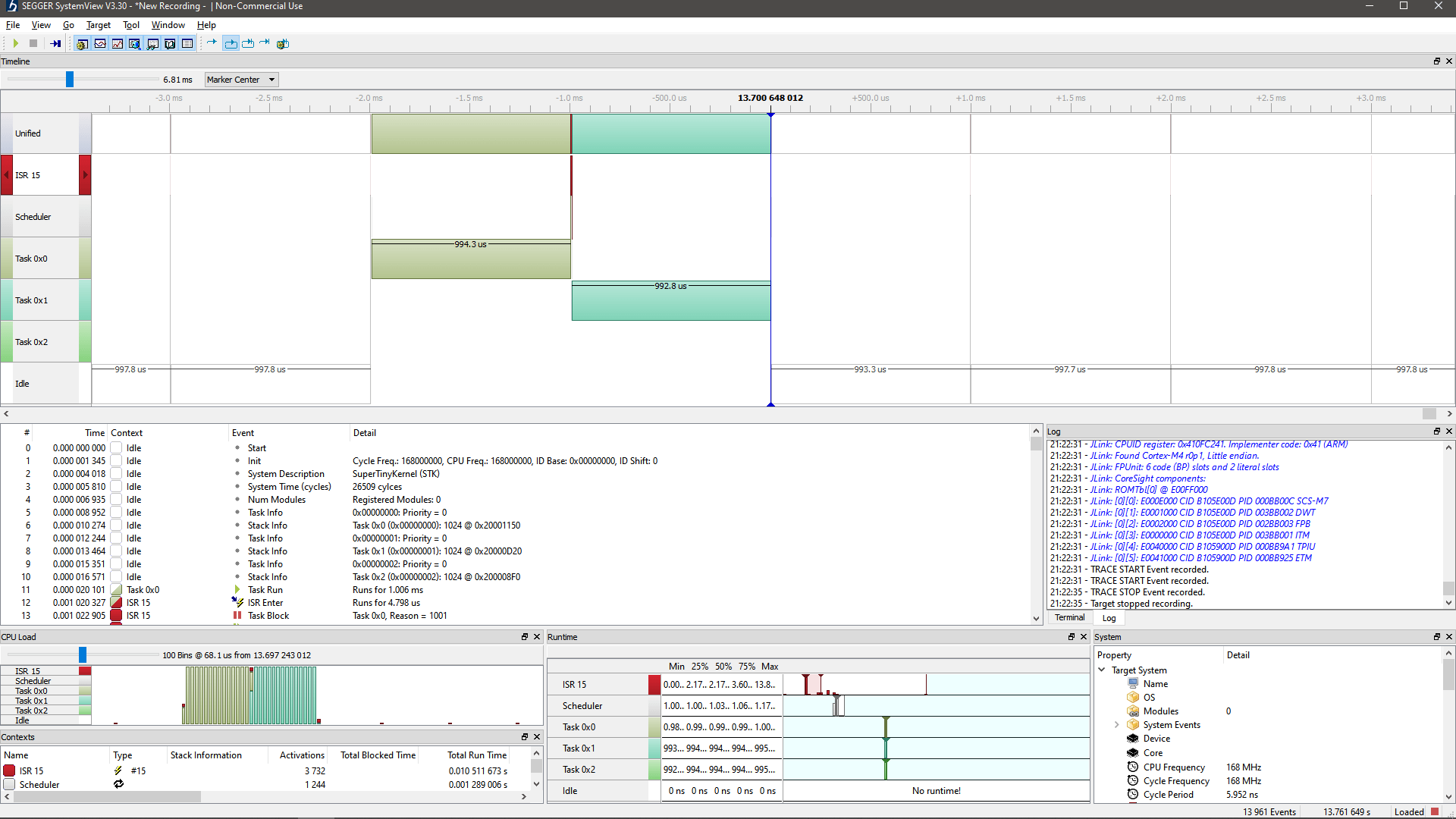
| Traceable | Scheduling is fully traceable with a SEGGER SystemView |
| Development mode (x86) | Run the same threaded application on Windows |
| 100% test coverage | Every source-code line of scheduler logic is covered by unit tests |
| QEMU test coverage | All repository commits are automatically covered by unit tests executed on QEMU for Cortex-M and RISC-V |
There are several tickless examples:
STK is the only known RTOS that offers all popular switching strategies to match any usage scenario, see stk/strategy for more details.
| Strategy Name | Mode | Description |
|---|---|---|
| SwitchStrategyRoundRobin / SwitchStrategyRR | Soft / HRT | Round-Robin scheduling strategy (Default). Each runnable task receives one time slice per tick in turn. Allows 100% CPU utilization. |
| SwitchStrategySmoothWeightedRoundRobin / SwitchStrategySWRR | Soft / HRT | Smooth Weighted Round-Robin (SWRR). Distributes CPU time proportionally to per-task weights with burst-free interleaving. On each tick: every task's current weight is incremented by its static weight; the task with the highest current weight runs and then has the total weight sum deducted. Includes a wake-up priority boost to prevent I/O-bound task starvation. |
| SwitchStrategyFixedPriority | Soft / HRT | Fixed-Priority Round-Robin. Tasks have fixed priorities (up to 32 levels); same-priority tasks are scheduled in Round-Robin order. Behavior is similar to FreeRTOS's scheduler. |
| SwitchStrategyRM | HRT | Rate-Monotonic (RM). Assigns fixed priorities based on task periodicity — shorter period means higher priority. Optimal among all fixed-priority policies for independent periodic tasks. Includes WCRT schedulability analysis. |
| SwitchStrategyDM | HRT | Deadline-Monotonic (DM). Assigns fixed priorities based on task deadlines — shorter deadline means higher priority. Generalizes RM; optimal when deadlines ≤ periods. Includes WCRT schedulability analysis. |
| SwitchStrategyEDF | HRT | Earliest Deadline First (EDF). Selects the runnable task with the smallest relative deadline (deadline − elapsed_duration) via an O(n) linear scan each tick. Provably optimal for single-processor systems — if a feasible schedule exists, EDF will find it. |
| SwitchStrategyMCAS 🔒 | HRT | Mixed-Criticality Adaptive Scheduler (2-level). SWRR within each criticality group (LO / HI) with automatic escalation to a protected HI-only mode on budget overrun. Commercial License |
| SwitchStrategyMCAS4 🔒 | HRT | Mixed-Criticality Adaptive Scheduler (4-level). Extends MCAS with four criticality levels, cascade escalation/recovery, and elastic CPU share adaptation via per-group EWMA pressure estimation. Commercial License |
| Custom | Soft / HRT | Custom algorithm implemented via the ITaskSwitchStrategy interface. By implementing the ITaskSwitchStrategy interface you can provide your own unique scheduling strategy without changing anything inside the kernel. |
🔒 Commercial strategies are available to commercial licensees. See the bottom of README.md for contact details.
Starting with ARM Cortex-M3 and all newer cores (M3/M4/M7/M33/M55/...) that implement the Armv7-M or Armv8-M architecture with the Memory Protection Unit (MPU), STK supports explicit privilege separation between tasks.
| Access Mode | Privileged (ACCESS_PRIVILEGED) | Unprivileged (ACCESS_USER) |
|---|---|---|
| CPU privilege level | Runs in Privileged Thread Mode | Runs in Unprivileged Thread Mode |
| Direct peripheral access | Allowed (normal register/bit-band access) | Blocked by the hardware (BusFault on any peripheral access) |
| Ability to call SVC / trigger PendSV | Yes | No (but STK services allow Sleep, Delay, Yield, CS, ...) |
| Ability to execute privileged instructions (CPS, MRS/MSR for control regs, etc.) | Yes | No |
| Typical use case | Drivers, hardware abstraction, critical infrastructure code | Application logic, protocol parsers, third-party or untrusted code |
Modern embedded systems increasingly process untrusted or complex data (network/USB packets, sensor data, firmware updates, etc.). By marking tasks that parse potentially attacker-controlled data as ACCESS_USER, you get hardware-enforced isolation:
STK supports multicore embedded microcontrollers (e.g., ARM Cortex-M55, dual-core Cortex-M33/M7/M0, or multicore RISC-V devices) through a per-core instance model (Asymmetric Multi-Processing).
AMP design delivers maximum performance while keeping STK kernel extremely lightweight:
| Feature | Description |
|---|---|
| Zero intercore overhead | No cross-core communication inside STK itself |
| Minimal latency | Scheduling decisions are local to the core |
| Full cache efficiency | All kernel data structures stay in the local core’s L1 cache |
| Independent timing domains | One core can run hard real-time tasks while another runs soft real-time or dynamic tasks |
| Simple and predictable | No complex SMP synchronization logic required in the kernel |
| No core congestion | Highest possible performance and deterministic timing on each individual core |
STK provides a rich set of synchronization primitives (see stk/sync) which are suitable for multicore synchronization with multiple STK instances.
There is a dual-core example for Raspberry Pico 2 W board with RSP2350 MCU in build/example/project/eclipse/rpi/blinky-smp-rp2350w directory.
Note: A minimal set of CMSIS/BSP API is used by STK.
For a seamless integration with C projects STK provides a dedicated, fully-featured C interface. See interop/c for more details and example.
STK provides a feature-rich synchronization API which is located in stk/sync and resides in a dedicated namespace stk::sync. It is a high-performance framework designed for both single-core and multicore embedded systems and provides a robust mechanism for inter-task and inter-core communication.
| Primitive | Description |
|---|---|
| hw::CriticalSection | Low-level primitive (including RAII version hw::CriticalSection::ScopedLock) that ensures atomicity by preventing preemption. Always available and independent of KERNEL_SYNC mode. |
| hw::SpinLock | High-performance non-recursive primitive for short critical sections. A key primitive for inter-core synchronization. Always available and independent of KERNEL_SYNC mode. |
| sync::ScopedCriticalSection | RAII wrapper around hw::CriticalSection (disables interrupts + multicore guard). Used as a building brick by all other stk::sync primitives. Always available, independent of KERNEL_SYNC mode. |
| sync::ConditionVariable | Monitor-pattern signaling used with an IMutex-compatible lock. Atomically releases the lock and blocks the caller; re-acquires it on wake. Supports Wait(), NotifyOne(), and NotifyAll(). |
| sync::Event | Binary state-based signaling object. Supports manual-reset (wake all) and auto-reset (wake one) modes. Also provides Pulse() (Win32-compatible semantics) and non-blocking TryWait(). |
| sync::EventFlags | 32-bit multi-flag synchronization group. Each bit is an independent event; tasks can wait for any one (OPT_WAIT_ANY) or all (OPT_WAIT_ALL) requested bits. Matched bits are auto-cleared on wake; pass OPT_NO_CLEAR to keep them set. ISR-safe Set(), Clear(), and Get(). |
| sync::Mutex | Recursive mutual exclusion primitive. Tracks ownership and recursion depth; the same task may lock multiple times. Ownership transfers directly to the first waiter (FIFO) on Unlock(). |
| sync::RWMutex | Reader-Writer Lock for shared (read) and exclusive (write) access. Implements a Writer Preference policy to prevent writer starvation. Provides RAII guards ScopedTimedLock and ScopedTimedReadMutex. |
| sync::SpinLock | High-performance recursive spinlock for very short critical sections where context-switch overhead is unacceptable. Busy-waits until the lock is free; ISR-unsafe (use hw::CriticalSection from ISR context). |
| sync::Semaphore | Counting semaphore for resource throttling and signaling. Features a Direct Handover policy: Signal() passes the token directly to the first waiting task without touching the internal counter. |
| sync::Pipe | Thread-safe FIFO ring buffer for inter-task data passing. Supports blocking and non-blocking single-element and bulk (WriteBulk / ReadBulk) I/O with zero dynamic memory allocation. |
| Custom | Extensible: any class inheriting from ISyncObject can implement custom synchronization logic integrated with the kernel scheduler. |
Note: Synchronization can be enabled in the kernel selectively by adding KERNEL_SYNC flag. If application does not need sync primitives and KERNEL_SYNC is not set to the kernel then synchronization-related implementation is stripped by the compiler saving FLASH and RAM.
Scheduling can be analyzed with the SEGGER SystemView.
There is a ready to try Blinky example with SEGGER SystemView tracing enabled: build/example/project/eclipse/stm/blinky-stm32f407g-disc1-segger
STK includes a full scheduling emulator for Windows to speed up a prototype development:
STK has been tested on the following development boards:
Note: The list of tested boards does not limit STK’s compatibility. STK does not depend on a specific board and relies only on the underlying CPU architecture. As long as target CPU is supported, STK can be integrated with your hardware platform.
| Coverage | Description |
|---|---|
| Platform-independent code | 100% unit test coverage |
| Platform-dependent code | tested under QEMU for each supported architecture |
Board: STM32F407G-DISC1, MCU: STM32F407VG (Cortex-M4 168MHz)
Update: March 2026
Compiler: GCC 14.2.1 (arm-none-eabi-gcc)
This table compares SuperTinyKernel RTOS v.1.05.3 and FreeRTOS V11.2.0 across two compiler optimization levels: -Os and -Ofast. The workload consists of a CRC32-based synthetic task running across multiple tasks/threads to measure scheduling overhead and timing determinism. Benchmark projects are located in build/benchmark/eclipse and the benchmark suite is located in build/benchmark/perf.
The benchmark suite uses CRC32 hash calculations as the task payload. The score represents the number of CRC32 calculations performed by the task within a fixed time window. A higher score indicates a more efficient scheduler, meaning the tasks have more available CPU time.
| Kernel | Tasks | Opt | Throughput | Average | Jitter | Flash | RAM |
|---|---|---|---|---|---|---|---|
| STK | 16 | -Ofast | 993,010 | 62,063 | 754 | 23.0 KB | 6.9 KB |
| FreeRTOS | 16 | -Ofast | 966,017 | 60,374 | 909 | 14.5 KB | 8.8 KB |
| STK | 16 | -Os | 752,119 | 47,007 | 425 | 14.4 KB | 6.9 KB |
| FreeRTOS | 16 | -Os | 735,342 | 45,958 | 472 | 12.6 KB | 8.8 KB |
| — | — | — | — | — | — | — | — |
| STK | 8 | -Ofast | 988,882 | 123,610 | 866 | 23.0 KB | 6.9 KB |
| FreeRTOS | 8 | -Ofast | 932,654 | 116,581 | 613 | 14.5 KB | 8.8 KB |
| STK | 8 | -Os | 752,935 | 94,116 | 659 | 14.4 KB | 6.9 KB |
| FreeRTOS | 8 | -Os | 713,292 | 89,161 | 468 | 12.6 KB | 8.8 KB |
| — | — | — | — | — | — | — | — |
| STK | 4 | -Ofast | 989,405 | 247,351 | 742 | 23.0 KB | 6.9 KB |
| FreeRTOS | 4 | -Ofast | 881,082 | 220,270 | 671 | 14.5 KB | 8.8 KB |
| STK | 4 | -Os | 753,335 | 188,333 | 564 | 14.4 KB | 6.9 KB |
| FreeRTOS | 4 | -Os | 673,845 | 168,461 | 510 | 12.6 KB | 8.8 KB |
You can build and run examples without any hardware on Windows.
with Visual Studio:
with Eclipse CDT:
To import project into Eclipse workspace:
You can use your own tools, below specified tools are just for a quick evaluation of STK's functionality using the provided examples.
For STM32, RPI platforms:
For NXP platforms:
For RISC-V platforms:
If you are targeting only ARM, RISC-V tools are not required.
All examples are located in build/example/project/eclipse folder.
Examples are grouped by platform:
STM32 and Raspberry Pico examples include SDK files located in deps/target folder.
Located in build/example/project/nxp-mcuxpresso folder.
Compatible with:
Below example toggles RGB LEDs on a development board. Each LED is controlled by its own thread, switching at 1s intervals:
You can include STK in your project using git submodule or by copying the source into a libs/ or third_party/ folder:
Add the STK directory and link against STK:
Run your normal build procedure. STK will now be compiled and linked with your project.
STK can be integrated by simply copying its source files from stk/ folder.
This method is suitable for:
From the root of STK repository, copy:
into your project's source tree, for example:
Add the following include path to your project configuration:
In CMake:
In GCC/Makefile:
For example, for ARM Cortex-M4 project:
You must compile STK core sources from:
Minimum required sources:
Example (GCC, ARM Cortex-M MCU):
Build your project normally — STK will now be compiled together with it.
Note: With this method only /stk folder containing STK kernel files is cloned, examples, deps and anything else is omitted.
Porting STK to a new platform is straightforward. Platform-dependent files are located in:
STK's OOD design allows easy extension of its functionality. For example, you can develop and attach your own scheduling algorithm by inheriting ITaskSwitchStrategy interface.
STK is released under the MIT Open Source License.
You may freely use it in projects of any type:
While SuperTinyKernel™ RTOS is provided under the permissive MIT license, we offer dedicated professional services for organizations integrating STK into production-grade, mission-critical, or regulated environments.
For inquiries, contact: stk@neutroncode.com